
UOMOP
Image reconstruction with CBM 본문
import torch
import numpy as np
import tqdm
import matplotlib.pyplot as plt
import torchvision.transforms as transforms
import torch.nn.functional as F
import math
import torch
import torchvision
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as f
from torch.utils.data import DataLoader, Dataset
import time
from params import *
import os
from tqdm import tqdm
import numpy as np
import cv2
import matplotlib.pyplot as plt
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
class Encoder(nn.Module):
def __init__(self, latent_dim):
super(Encoder, self).__init__()
self.latent_dim = latent_dim
self.encoder = nn.Sequential(
nn.Conv2d(3, 32, kernel_size=3, stride=2, padding=1), # Output: [batch, 32, 16, 16]
nn.ReLU(),
nn.Conv2d(32, 64, kernel_size=3, stride=2, padding=1), # Output: [batch, 64, 8, 8]
nn.ReLU(),
nn.Conv2d(64, 128, kernel_size=3, stride=2, padding=1), # Output: [batch, 128, 4, 4]
nn.ReLU(),
nn.Flatten(),
nn.Linear(4*4*128, self.latent_dim),
)
def forward(self, x):
return self.encoder(x)
class Decoder(nn.Module):
def __init__(self, latent_dim):
super(Decoder, self).__init__()
self.latent_dim = latent_dim
self.decoder = nn.Sequential(
nn.Linear(self.latent_dim, 4*4*128),
nn.ReLU(),
nn.Unflatten(1, (128, 4, 4)),
nn.ConvTranspose2d(128, 64, kernel_size=4, stride=2, padding=1), # Output: [batch, 64, 8, 8]
nn.ReLU(),
nn.Conv2d(64, 64, kernel_size=3, padding=1),
nn.ReLU(),
nn.ConvTranspose2d(64, 32, kernel_size=4, stride=2, padding=1), # Output: [batch, 32, 16, 16]
nn.ReLU(),
nn.Conv2d(32, 32, kernel_size=3, padding=1),
nn.ReLU(),
nn.ConvTranspose2d(32, 3, kernel_size=4, stride=2, padding=1), # Output: [batch, 3, 32, 32]
nn.Sigmoid()
)
def forward(self, x):
return self.decoder(x)
class Autoencoder(nn.Module):
def __init__(self, latent_dim):
super(Autoencoder, self).__init__()
self.latent_dim = latent_dim
self.encoder = Encoder(latent_dim)
self.decoder = Decoder(latent_dim)
def AWGN(self, input, SNRdB):
normalized_tensor = f.normalize(input, dim=1)
SNR = 10.0 ** (SNRdB / 10.0)
std = 1 / math.sqrt(self.latent_dim * SNR)
n = torch.normal(0, std, size=normalized_tensor.size()).to(device)
return normalized_tensor + n
def forward(self, x, SNRdB):
encoded = self.encoder(x)
channel_output = self.AWGN(encoded, SNRdB)
decoded = self.decoder(channel_output)
return decoded
def patch_std(image, patch_size=2):
# Calculate the standard deviation within each patch
H, W = image.shape
std_map = np.zeros((H // patch_size, W // patch_size))
for i in range(0, H, patch_size):
for j in range(0, W, patch_size):
patch = image[i:i + patch_size, j:j + patch_size]
std_map[i // patch_size, j // patch_size] = np.std(patch)
return std_map
def mask_patches_chessboard(images, patch_size=2, mask_ratio=0.5, complexity_based=False):
if mask_ratio != 0.5:
B, C, H, W = images.shape
masked_images = images.clone()
for b in range(B):
image = images[b].permute(1, 2, 0).cpu().numpy() * 255
image = image.astype(np.uint8)
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
# Calculate complexity for each patch
complexity_map = patch_std(gray, patch_size)
# Initialize mask with chessboard pattern for complexity map dimensions
complexity_height, complexity_width = complexity_map.shape
mask = np.zeros((complexity_height, complexity_width), dtype=bool)
mask[::2, 1::2] = 1
mask[1::2, ::2] = 1
if complexity_based:
if mask_ratio > 0.5:
additional_masking_ratio = (mask_ratio - 0.5) / 0.5
complexity_threshold = np.quantile(complexity_map[~mask], 1 - additional_masking_ratio)
additional_mask = complexity_map <= complexity_threshold
print(111)
print(additional_mask.shape)
mask[~mask] = additional_mask[~mask]
else:
unmasking_ratio = (0.5 - mask_ratio) / 0.5
complexity_threshold = np.quantile(complexity_map[mask], unmasking_ratio)
unmask = complexity_map >= complexity_threshold
mask[mask] = ~unmask[mask]
# Apply mask to the original image based on complexity map
for i in range(complexity_height):
for j in range(complexity_width):
if mask[i, j]:
image[i * patch_size:(i + 1) * patch_size, j * patch_size:(j + 1) * patch_size] = 0
# Convert image back to PyTorch format
image = image.astype(np.float32) / 255.0
masked_images[b] = torch.from_numpy(image).permute(2, 0, 1)
elif mask_ratio == 0.5:
B, C, H, W = images.shape
masked_images = images.clone()
# Create the chessboard pattern
pattern = np.tile(np.array([[1, 0] * (W // (2 * patch_size)), [0, 1] * (W // (2 * patch_size))]),
(H // (2 * patch_size), 1))
for b in range(B):
image = images[b].permute(1, 2, 0).cpu().numpy() * 255
image = image.astype(np.uint8)
# Apply masking
mask = np.repeat(np.repeat(pattern, patch_size, axis=0), patch_size, axis=1)
image[mask == 0] = 0 # Apply chessboard pattern masking
# Convert back to PyTorch format
image = image.astype(np.float32) / 255.0
masked_images[b] = torch.from_numpy(image).permute(2, 0, 1)
return masked_images
def load_model(model_path):
model = torch.load(model_path)
model.eval() # 모델을 평가 모드로 설정
return model
transform = transforms.Compose([transforms.ToTensor()])
testset = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform)
testloader = DataLoader(testset, batch_size=1, shuffle=True)
def visualize_reconstruction(model, data_loader):
model.eval() # 모델을 평가 모드로 설정
data_iter = iter(data_loader)
images, labels = next(data_iter) # 데이터 로더에서 이미지를 가져옴
# 마스킹 처리
masked_images = mask_patches_chessboard(images, patch_size=params['PS'], mask_ratio=params['MR'], complexity_based=True).to(device)
# 모델을 사용하여 이미지 복원
with torch.no_grad():
reconstructed_images = model(masked_images, params['SNR'])
images = images.numpy()
masked_images = masked_images.cpu().numpy()
reconstructed_images = reconstructed_images.cpu().numpy()
plt.figure(figsize=(9, 3))
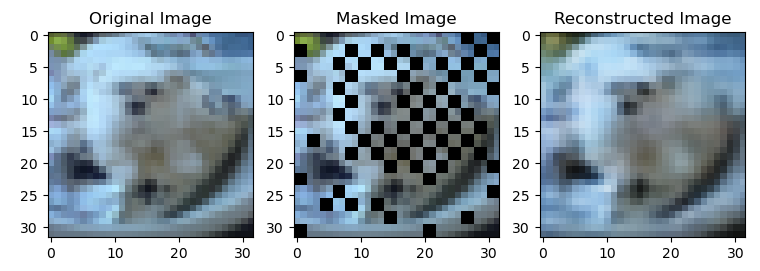
plt.subplot(1, 3, 1)
plt.imshow(np.transpose(images[0], (1, 2, 0)))
plt.title('Original Image')
plt.subplot(1, 3, 2)
plt.imshow(np.transpose(masked_images[0], (1, 2, 0)))
plt.title('Masked Image')
plt.subplot(1, 3, 3)
plt.imshow(np.transpose(reconstructed_images[0], (1, 2, 0)))
plt.title('Reconstructed Image')
plt.show()
model_path = 'trained_model/CBS(PS=' + str(params['PS'])+ '_DIM=' + str(params['DIM']) + '_MR=' + str(params['MR']) + '_SNR=' + str(params['SNR'])+ '_PSNR=' + str(params['PSNR'])+').pt'
model = load_model(model_path).to(device)
# 복원된 이미지 시각화
visualize_reconstruction(model, testloader)
'Main' 카테고리의 다른 글
| Matlab code for PSNR performance comparison (0) | 2024.05.24 |
|---|---|
| DeepJSCC performance ( DIM = 768, 1536, 2304 ) (0) | 2024.05.17 |
| Patch complexity calculated region extending (0) | 2024.05.03 |
| ChessBoard Masking with Colored Random Noise (0) | 2024.05.02 |
| CBS (odd, odd) masking (0) | 2024.04.18 |
'Main' Related Articles
more



Comments